Graphics – Bezier curves to build attacker path planning, visualization of color segmentation on HSV color space using the MaggicSegmentation.
2022 - Masters Student in Mechanical Engineering (Dynamics and Mechatronics)
Actual status: “Working on something cool with legged and arm robots”.
2014 - 2021 - B.Sc. in Computer Engineering
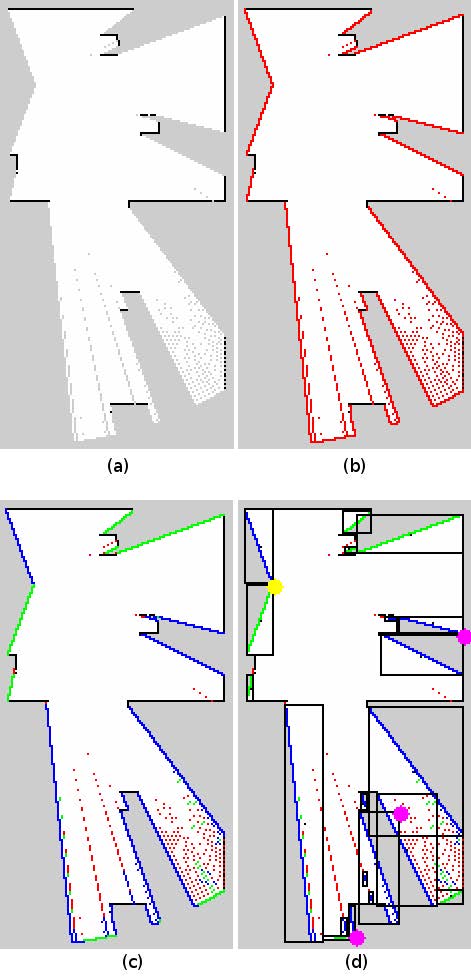
Undergraduate final project: “MaggicVision: A Fast and Lighting-invariant Computer Vision System for IEEE Very Small Size Soccer”. Read here
Literature review on Federated Learning, prepared and executed simulations, implemented core and miscellaneous project codes/scripts, configured devops pipeline for deployment, executed continuous code optimizations.
Working with Python for backend, Python and JavaScript for frontend, Docker for containerizing.
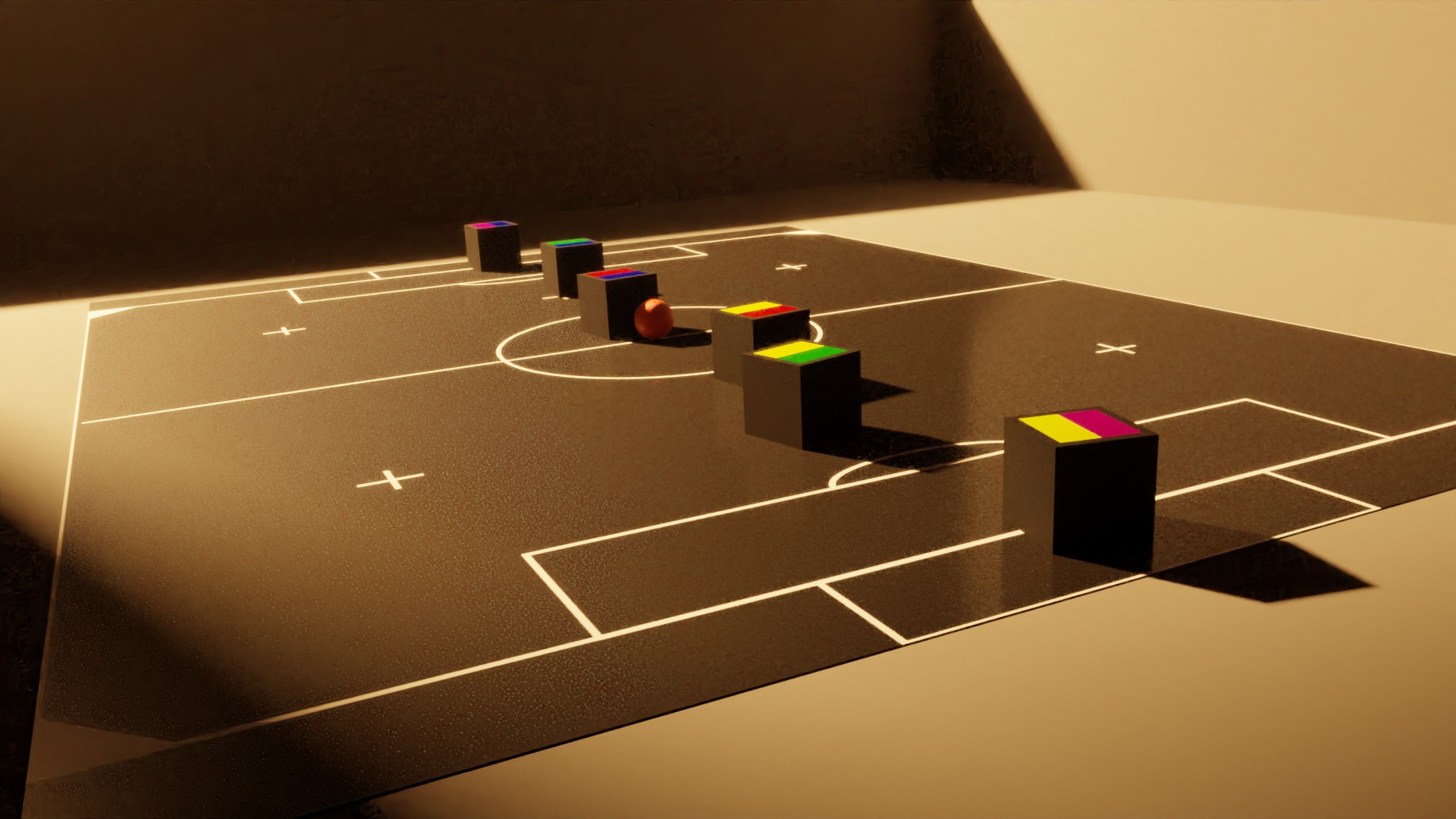
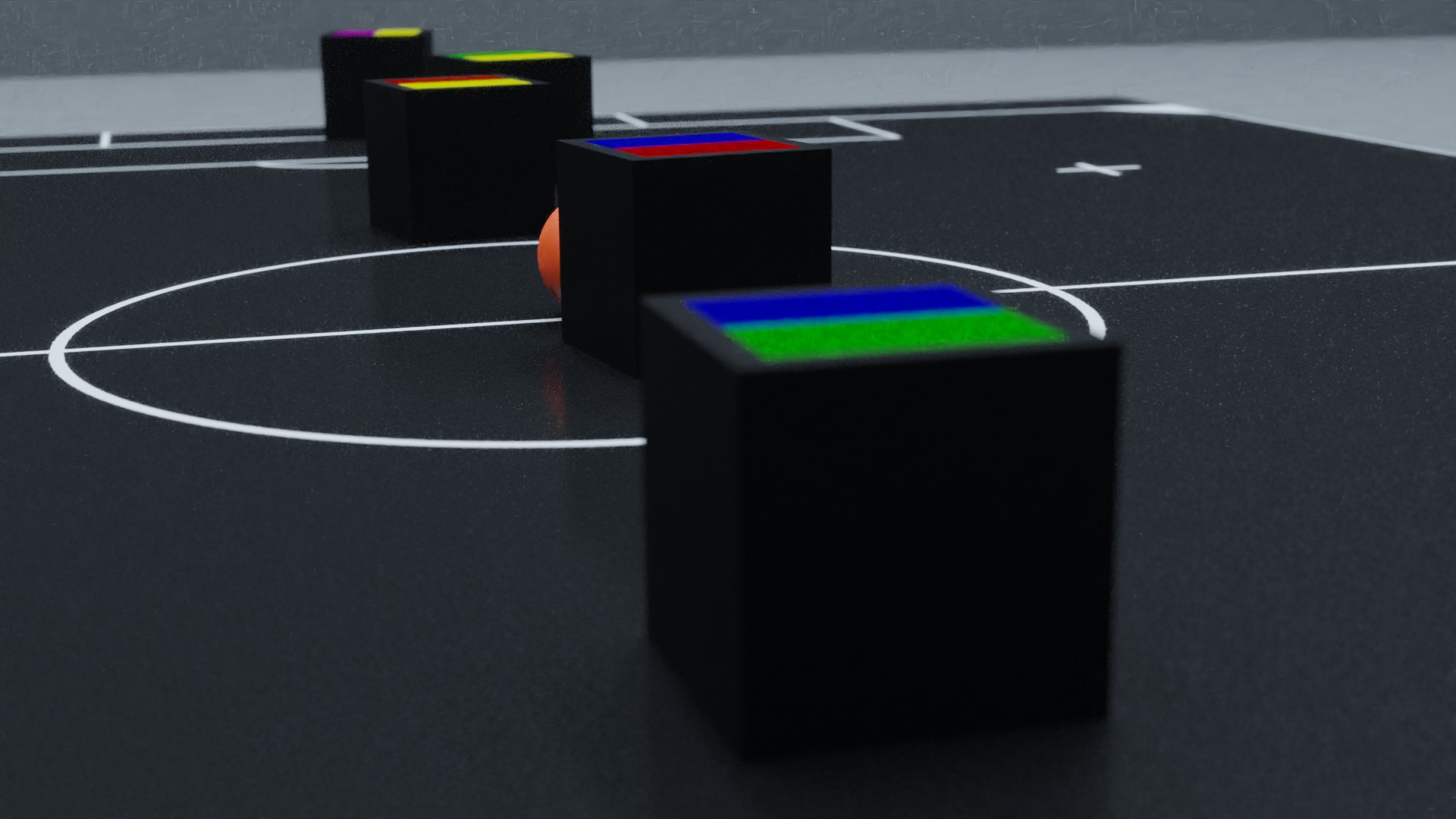
Tackle the reality gap with robotic simulation and implementation in a physical robot.
Configured dockerfiles and scripts to run simulation and on physical robot. Robot modeling, and integration of simulation with a reinforcement learning framework. Implementation of the robot’s drivers for ROS2 based on ROS1 drivers. Implemented vision abstraction for virtual and real environment target detection. Integrated vision, inference network, and control modules.
Implemented the 3D simulator with three.js library for model loading and rendering. Integrated a C++ interpreter in JavaScript. Created a graphic interface that shows the simulation on the left, and control code development on the right.
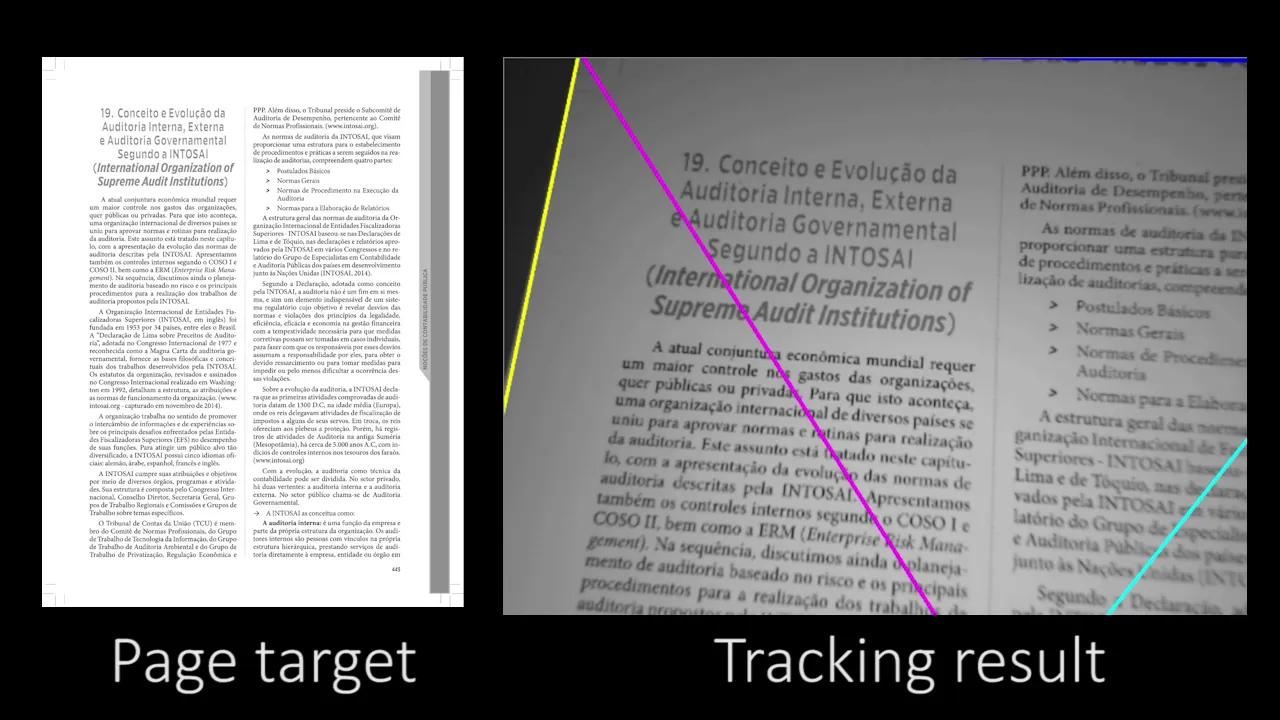
Link to Paper Link to SimulatorNew techniques for non-flat surface tracking in computer vision/augmented reality.
Improved photo geolocalization by combining ranking classifier with deep learning patch classification.
Link to PaperpARagraph text-based tracking technology
Implemented gestures detection, sample blocking-n-block game with hands using fishtank parallax effect.
Studies in code optimization and code parallelization in CPU. Used lens distortion effect as a case of study.
MaggicSegmentation (undergraduate final project), a fast and lighting-invariant segmentation technique inside MaggicVision (also in undergraduate final project).
Graphics – Bezier curves to build attacker path planning, visualization of color segmentation on HSV color space using the MaggicSegmentation.
Code optimization and parallel processing optimization in vision pipeline.
Network Communication between vision and control processes.
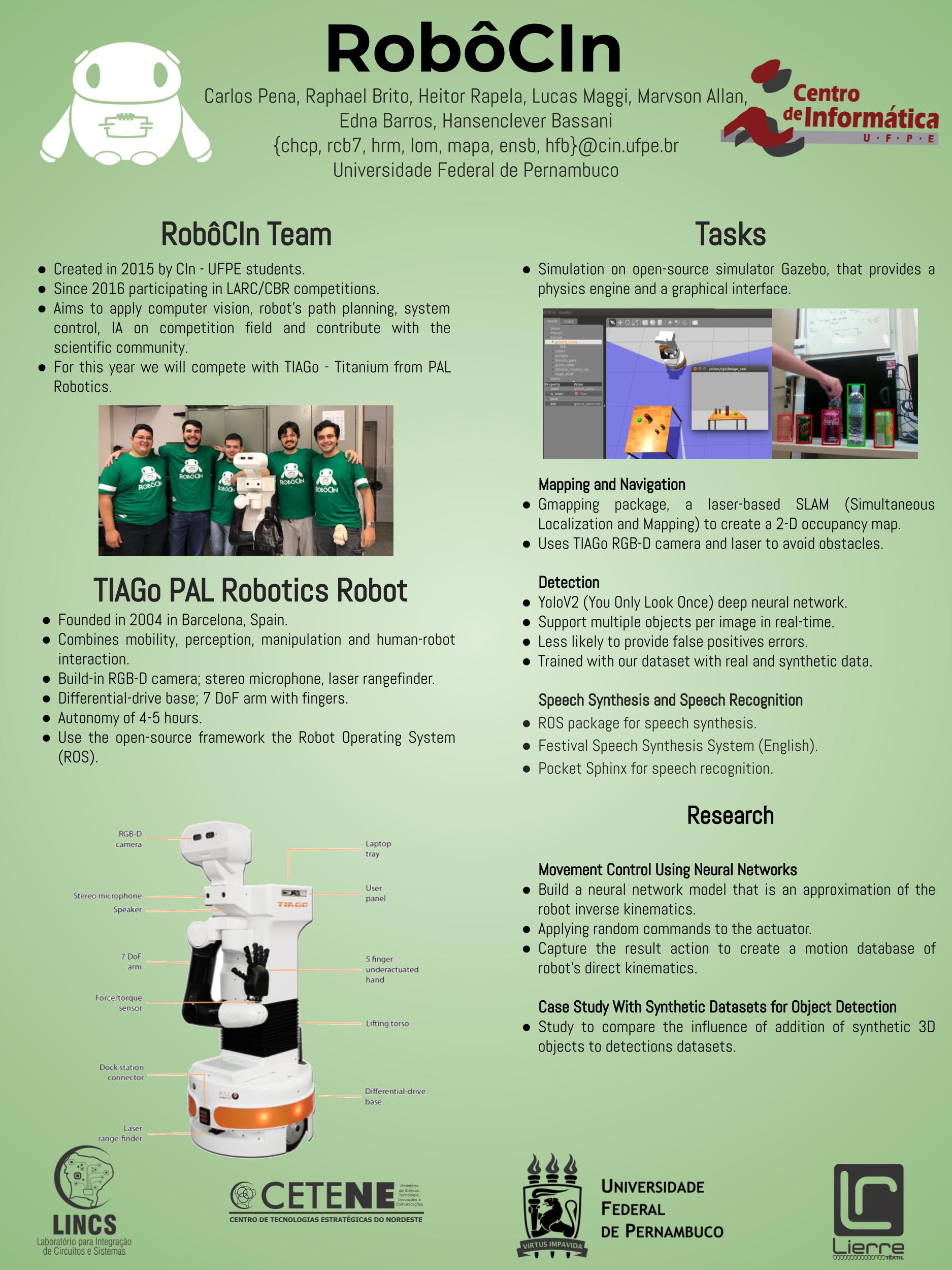
Implemented autonomous navigation and mapping using TIAGo’s robotic platform – IEEE @Home Competition.